차세대 소형 로봇 위한 고성능 하이드로겔 전극·액추에이터 개발
조진한 고려대 교수팀, 아주대 연구팀 공동연구결과
로봇 분야 세계 최고 권위 학술지 Science Robotics 게재

▲ 조진한 고려대 교수(교신저자), 고제성 아주대 교수(공동교신저자), 고종국 고려대 화공생명공학과 연구원(제1저자)
공과대학 화공생명공학과 조진한 교수 연구팀은 고제성 아주대 교수 연구팀과 함께 고전도·고신축성 하이드로겔 전극을 제작할 수 있는 원천 기술을 확보하고, 이를 기반으로 한 고성능·저전력 소프트 액추에이터와 초소형 수상로봇 개발에 성공했다.
* 소프트 액추에이터 : 기존 단단하고 부피가 큰 모터가 아닌 연성재료로 이루어진 구동기.
연구 결과는 로봇 분야 세계 최고 권위 학술지 ‘사이언스 로보틱스(Science Robotics, IF= 27.541)’에 한국시간 10월 27일 온라인 게재됐다.
- 논문명 : High-performance electrified hydrogel actuators based on wrinkled nanomembrane electrodes for untethered insect-scale soft aquabots
- 저 자 : 조진한 교수(교신저자, 고려대), 고제성 교수(공동교신저자, 아주대), 고종국 박사(제1저자, 고려대)
하이드로겔은 다양한 기능성과 효율적인 자극응답성을 가져서 미래형 로봇을 위한 구동기의 구성 재료로 주목받고 있다. 그러나 기존의 하이드로겔 기반 액추에이터의 경우 일반적으로 외부자극의 변화에 따른 내부 삼투압 변화 및 이에 따른 물의 이동으로 구동을 하여 속도가 느리고, 움직임을 조절하기 어렵다는 한계를 가지고 있었다. 특히, 복잡한 움직임을 요구하는 로봇 시스템에 적용하기에는 힘들었다.
전기적 자극을 사용할 경우, 하이드로겔 액추에이터의 성능·제어성을 크게 향상시킬 수 있을 뿐만 아니라, 발전하는 배터리·반도체 기술과 결합할 경우, 다양한 형태의 차세대 로봇·디바이스로 발전할 가능성을 가진다. 그러나, 하이드로겔의 많이 수분함유량과 이에 따른 표면의 젖음 현상으로 전기전도성을 부여하기 위한 전도성 물질을 도입이 어려웠다.
연구팀은 새롭게 발견한 친수·소수성 계면 나노입자 상온 소결 현상을 이용하여 하이드로겔의 표면에 금나노입자의 단일 용액공정으로 높은 전기 전도도와 신축성을 가지는 다공성 전극을 형성시킬 수 있었다. 뿐만 아니라 하이드로겔의 크기를 쉽게 조절할 수 있다는 특징을 이용해 하이드로겔의 수축을 유도, 주름 구조를 형성시켜 최종적으로 주름진 다공성 전극을 형성시켜 전도도와 신축성을 더욱 향상시킬 수 있었다. 이렇게 제작된 하이드로겔 전극은 기존에 보고된 하이드로겔 기반 전극에 비해 우수한 전기 전도도와 높은 신축성을 동시에 가질 수 있음을 확인할 수 있었다.
이렇게 제작된 주름진 다공성 전극을 통해 하이드로겔에 전기장을 가할 경우, 3V의 낮은 전압에서도 전기삼투 현상이 나타나 빠른 시간에 하이드로겔의 변형을 유도할 수 있을 뿐만 아니라 전기장의 세기 및 방향 조절을 통해 쉽게 구동을 조절할 수 있음을 확인했다. 즉, 기존의 전기구동 소프트 액추에이터의 한계를 극복할 수 있는 유용성과 가능성을 확인했다.
* 전기삼투 : 전압차이에 따라 일어나는 삼투 현상. 일반적으로 이온성 액체를 포함하는 다공성 물질에 전기장을 가했을 때, 전위차에 따라 유체의 흐름이 일어난다.
실제 성능은 기존의 하이드로겔 기반 액추에이터에 비해 100배 이상의 에너지 밀도와 10배 이상의 출력 밀도를 가지는 것을 확인하여 기존의 한계를 극복할 수 있음을 확인했다. 뿐만 아니라, 저전압(3V 이하)에서도 구동이 가능하기에, 기존에 보고된 전기구동 소프트 액추에이터가 높은 구동전압(1,000V 이상)이 높다는 문제를 해결한 새로운 형태의 액추에이터라고 할 수 있다.
기존의 소프트 액추에이터 기반 로봇들은 높은 전압이 요구되어 그 크기와 무게가 클 수밖에 없었다. 그러나 이번 연구의 하이드로겔 액추에이터는 작은 배터리와 회로만으로도 높은 성능을 보이기 때문에 기존의 보고된 수상로봇 중 크기는 가장 작으면서 빠른 수상 로봇을 제작할 수 있었다.
조진한 교수는 “소프트 액추에이터·로봇의 소형화를 위한 중요한 한계들을 극복한 결과로 향후 발전되는 배터리·반도체 기술을 융합한다면 소프트 자율로봇, 생체모사로봇, 능동형 메디컬 디바이스 등으로 발전할 수 있을 것으로 기대된다. 뿐만 아니라, 기반이 된 하이드로겔 전극 제작 기술은 기능성 하이드로겔을 손쉽게 전자소재화 할 수 있는 원천 기술로 다양한 형태의 차세대 소자에 도입할 수 있을 것”이라고 밝혔다.
연구성과는 과학기술정보통신부·한국연구재단이 추진하는 중견연구자지원사업, 나노 및 소재 기술개발사업과 고려대, 아주대, KU-KIST사업에서 지원된 연구비로 수행됐다.
[ 그 림 설 명 ]
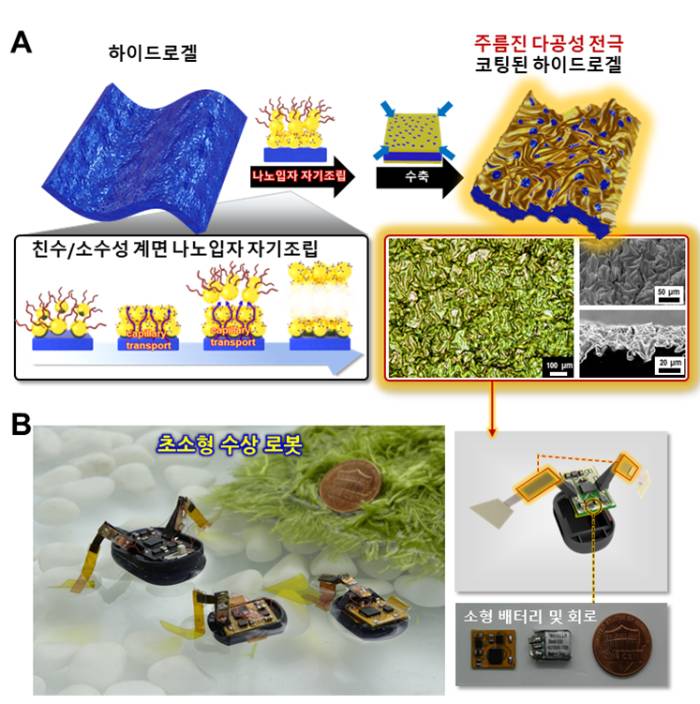
(그림1) 하이드로겔 액추에이터 제작 방법 및 초소형 로봇 구성 모식도
(A) 친수/소수성 계면 금 나노입자 자기조립 및 하이드로겔 수축을 이용한 주름진 다공성 전극의 하이드로겔 표면 코팅 개요도.
(B) 제작된 초소형 수상 로봇의 이미지와 그 구성도.
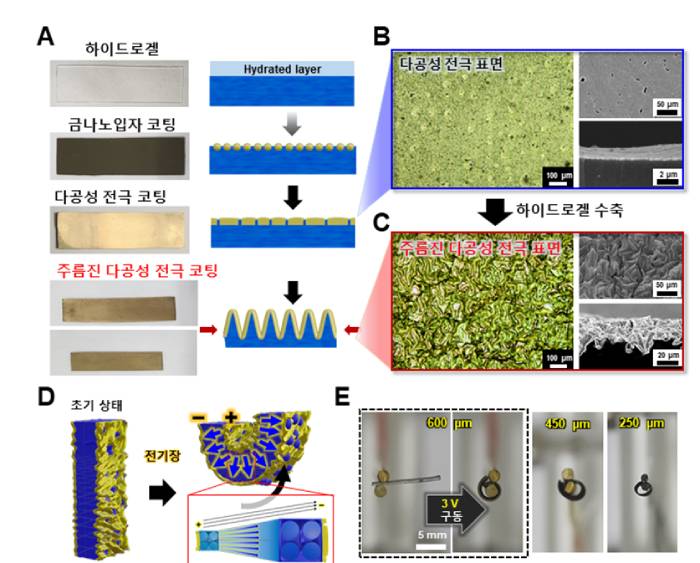
(그림2) 금 코팅된 면 섬유 전극의 표면/단면 이미지와 생체연료전지의 전력성능
(A) 주름진 다공성 전극 코팅의 제작과정 개요도 및 단계별 사진.
(B) 다공성 전극의 표면 및 단면 사진.
(C) 주름진 다공성 전극의 표면 및 단면 사진.
(D) 하이드로겔 액추에이터가 전기삼투에 의해 작동되는 원리 개요도.
(E) 두께별 하이드로겔 액추에이터의 실제 구동 사진.
커뮤니케이션팀 서민경(smk920@korea.ac.kr)



